The PAV Chassis and Sensors
In this page we present the kind of chassis ISSPA supports for its physical agent vehicles, as well as the sensors they can be equipped with.
Chassis
ISSPA’s vehicle chassis primarily adopts the Ackermann steering design, where the front two wheels act as steering wheels controlled by a servo motor while traction is provided by the rear two wheels that serve as drive wheels controlled by motors. This configuration enables basic vehicle maneuvers, such as steering and forward and reverse movement.
It is worth noting that some motors and servo motors are equipped with encoders, which record the wheel’s rotation count and direction. Chassis motion data can be transmitted to a MicroController Unit (MCU), which typically provides communication interfaces such as USART, I2C, SPI, that are capable of receiving data and transmitting control signals (e.g., pulse signals).
With an understanding of the chassis, one gains insights into the fundamental operations of ISSPA. In summary, information on the vehicle’s motion status can be obtained from the chassis. It is essential to emphasize that acquiring vehicle status is crucial for tasks such as digital twin.
Modern automobiles generally employ the Ackermann steering design, akin to the chassis of autonomous vehicles. Therefore, we currently focus on the development of vehicles with Ackermann chassis. In addition to the Ackermann design, we plan to incorporate in ISSPA various chassis designs in future work, such as two-wheel differential drive, four-wheel differential drive, four-wheel steering, etc., to meet diverse research needs.
MCU
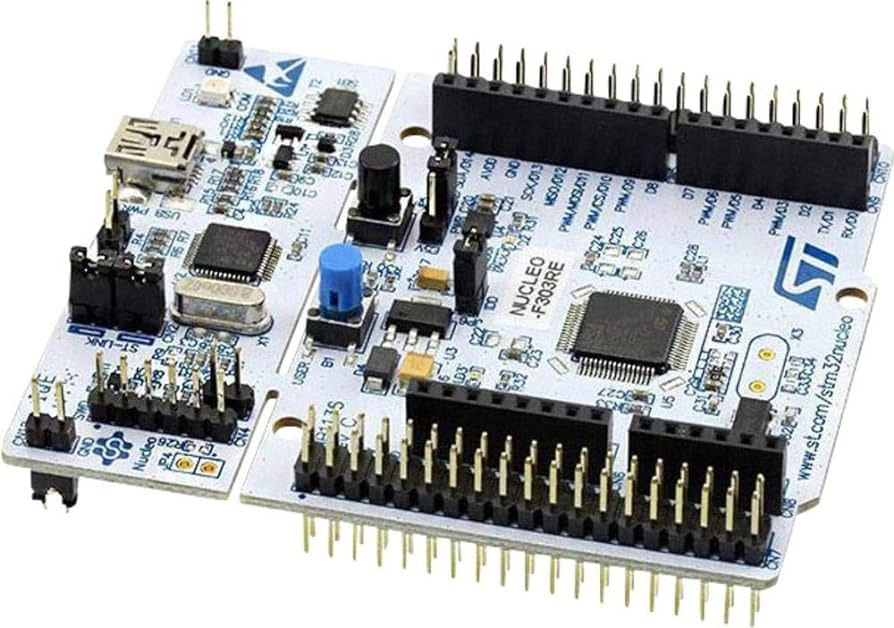
A MicroController Unit (MCU) is a miniature computer system that integrates a Central Processing Unit (CPU), memory (RAM and/or ROM), timers, and input/output ports. STM32 is a series of 32-bit MCUs based on the ARM Cortex-M core, introduced by STMicroelectronics. It finds wide applications in embedded systems, IoT devices, industrial control systems, and particularly in smart cars.
In the context of intelligent vehicles, the roles of MCUs like STM32 include:
- Communication Interfaces: MCUs typically integrate various communication interfaces such as UART, SPI, I2C, etc., facilitating data exchange with other devices, sensors, and communication modules. This enables real-time communication with external systems, such as remote controllers and wireless networks.
- Motor Control: The MCU controls motor drivers, adjusting the speed and direction of the motors. By receiving sensor feedback and executing control algorithms, e.g. PID, the MCU ensures that the vehicle travels along the intended path.
Wheel Encoders
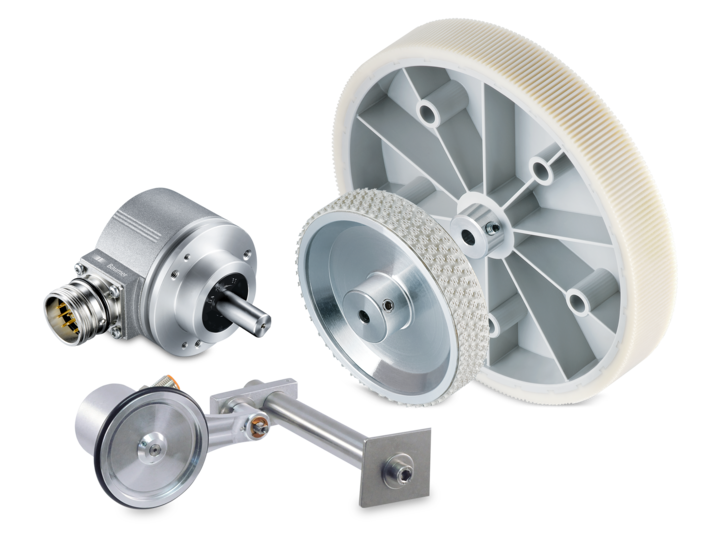
Wheel encoders in intelligent vehicles serve crucial functions in measuring and monitoring wheel motion, playing a significant role in applications such as odometry estimation, and precise positioning. Their main functions include:
- Speed and Direction measurement: wheel encoders measure the speed and direction of the vehicle by detecting the rotation of the wheels. By monitoring the rotation of each wheel, the system can calculate the actual motion state of the vehicle.
- Precise positioning: wheel encoders provide precise displacement information relative to the initial position of the vehicle. This is essential for navigation and positioning systems, especially in applications like autonomous driving and unmanned vehicles that require high-precision location information.
- Closed-loop control: in closed-loop control systems, feedback from wheel encoders is used to adjust the vehicle’s motion, ensuring it travels along the predefined path and speed. This is crucial for achieving stable automatic control.
- Odometry estimation: wheel encoders can be used to estimate the mileage traveled by the vehicle. This is valuable for long-distance travel and path planning, ensuring that the vehicle reaches its destination according to the planned route.
In summary, wheel encoders play a key role in smart cars, providing real-time information on position, speed, and direction. This enables precise navigation, control, and obstacle avoidance capabilities for the vehicle.
Ackermann Steering
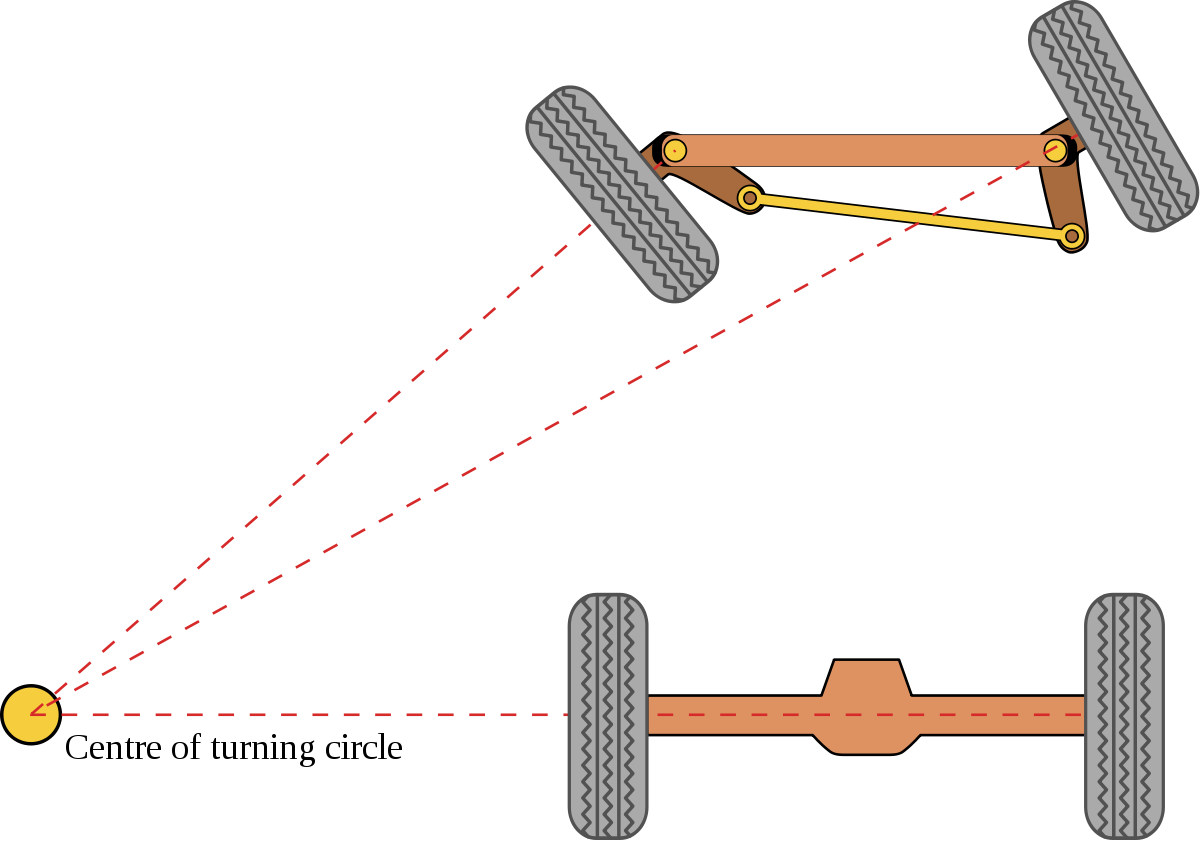
Ackermann steering is an engineering principle used in the design of vehicle steering systems, aiming to ensure that all wheels maintain a common turning radius during turns. This design method adjusts the steering angles of the vehicle’s wheels, allowing the inner wheels to turn more than the outer wheels to accommodate varying turning radii.This steering mechanism is widely employed in motor vehicles, particularly in cars and some heavy-duty vehicles.
- Common turning radius: the goal of Ackermann steering is to have all wheels share a common turning radius during turns, enhancing vehicle stability and driving control.
- Greater steering angle for inner wheels: during turns, Ackermann steering requires the inner wheels to have a larger steering angle than the outer wheels. This is achieved through carefully designed tie rods and steering mechanisms.
- Optimized driving stability: Ackermann steering design helps reduce lateral slip during turns, enhancing overall driving stability and maneuverability, especially during high-speed driving and sharp turns.
Sensors
The proper deployment and standardized use of sensors are crucial for the stable operation of autonomous vehicles, as the quality of their data significantly impacts the safety of vehicle navigation. In the field of autonomous driving, the array of sensors typically includes industrial cameras, LiDAR, mm-wave radar, GPS, and IMU, each with distinct data formats.
ISSPA’s Configuration
ISSPA’s vehicles can be equipped with single/multi-line LiDAR, mono/depth cameras, and IMU, providing researchers with a diverse range of options to meet their specific needs. Brief introductions to different sensors are as follows:
- LiDAR: a LiDAR utilizes laser beams to get distances by measuring the reflection time. Widely used in autonomous driving, LiDAR contributes to real-time mapping and object detection. Below is a frame of point cloud from a campus environment using velodyne’s 16-line LiDAR.
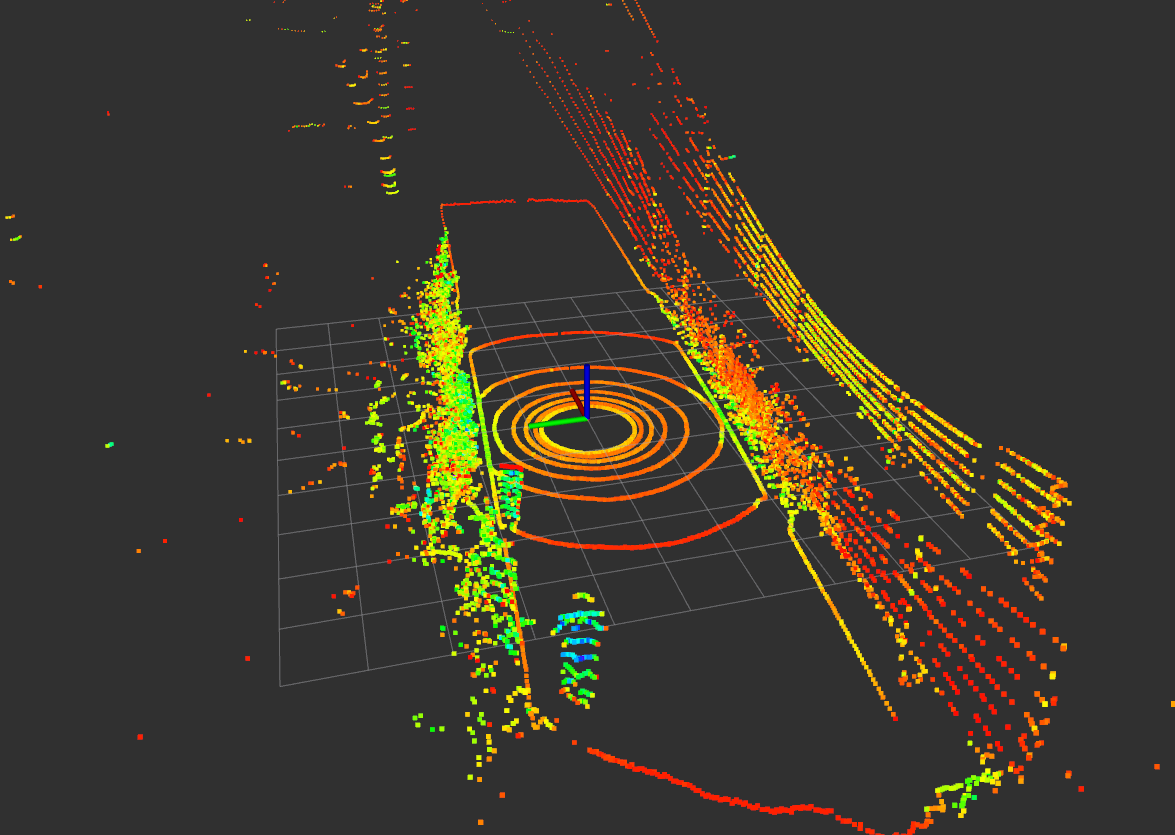
Sample LiDAR point cloud data collected at a campus environment - Depth Camera: depth cameras based on Time-of-Flight (ToF) technology use the principle of measuring the flight time of light pulses to determine the distance between objects and the camera. ToF depth cameras offer advantages of speed, accuracy, and adaptability to various lighting conditions. They find widespread applications in computer vision, 3D scanning, virtual reality, and augmented reality.
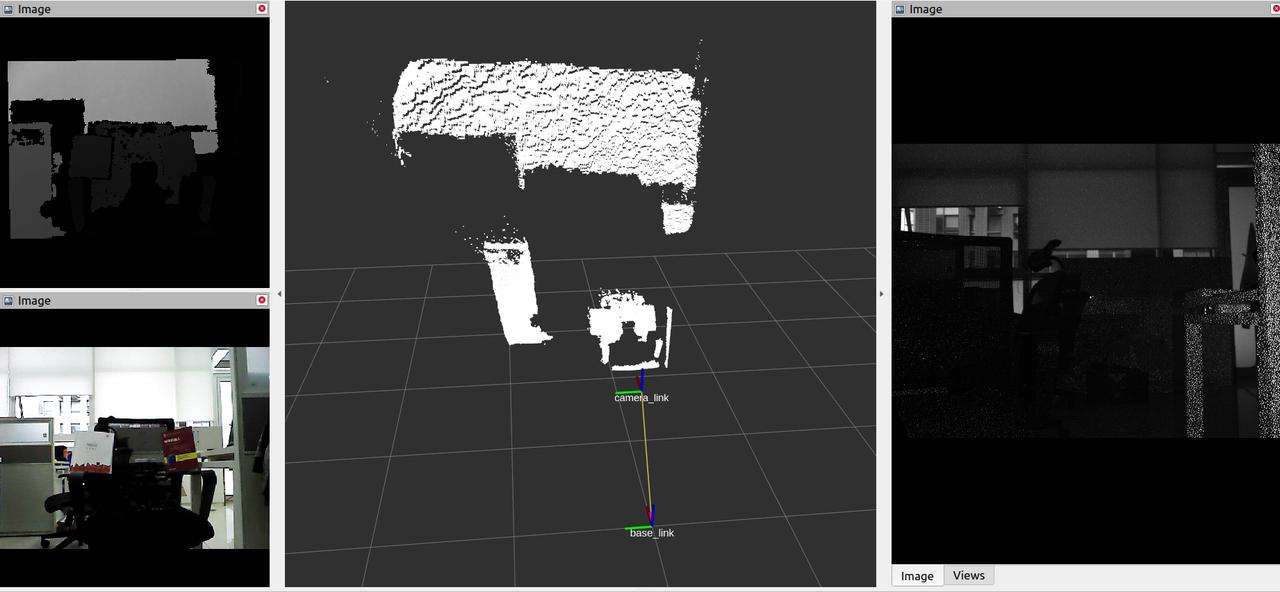
Data visualization of different modalities of depth cameras in a laboratory environment - IMU (Inertial Measurement Unit): an IMU provides information about a vehicle’s attitude and motion state by measuring acceleration and angular velocity. In autonomous driving systems, an IMU is commonly used to enhance navigation accuracy and stability.
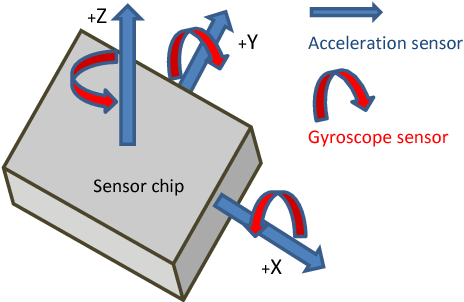
IMU example
Through the thoughtful selection and integration of these sensors, ISSPA aims to offer a flexible and diverse range of choices to meet various research requirements in different scenarios.